Your Transformer is Secretly Linear
This paper reveals a novel linear characteristic exclusive to transformer decoders, including models such as GPT, LLaMA, OPT, BLOOM and others. We analyze embedding transformations between sequential layers, uncovering a near-perfect linear relationship (Procrustes similarity score of 0.99). However, linearity decreases when the residual component is removed due to a consistently low output norm of the transformer layer. Our experiments show that removing or linearly approximating some of the most linear blocks of transformers does not affect significantly the loss or model performance. Moreover, in our pretraining experiments on smaller models we introduce a cosine-similarity-based regularization, aimed at reducing layer linearity. This regularization improves performance metrics on benchmarks like Tiny Stories and SuperGLUE and as well successfully decreases the linearity of the models. This study challenges the existing understanding of transformer architectures, suggesting that their operation may be more linear than previously assumed.
Diffusion for World Modeling: Visual Details Matter in Atari
World models constitute a promising approach for training reinforcement learning agents in a safe and sample-efficient manner. Recent world models predominantly operate on sequences of discrete latent variables to model environment dynamics. However, this compression into a compact discrete representation may ignore visual details that are important for reinforcement learning. Concurrently, diffusion models have become a dominant approach for image generation, challenging well-established methods modeling discrete latents. Motivated by this paradigm shift, we introduce DIAMOND (DIffusion As a Model Of eNvironment Dreams), a reinforcement learning agent trained in a diffusion world model. We analyze the key design choices that are required to make diffusion suitable for world modeling, and demonstrate how improved visual details can lead to improved agent performance. DIAMOND achieves a mean human normalized score of 1.46 on the competitive Atari 100k benchmark; a new best for agents trained entirely within a world model. To foster future research on diffusion for world modeling, we release our code, agents and playable world models at https://github.com/eloialonso/diamond.
Face Adapter for Pre-Trained Diffusion Models with Fine-Grained ID and Attribute Control
Current face reenactment and swapping methods mainly rely on GAN frameworks, but recent focus has shifted to pre-trained diffusion models for their superior generation capabilities. However, training these models is resource-intensive, and the results have not yet achieved satisfactory performance levels. To address this issue, we introduce Face-Adapter, an efficient and effective adapter designed for high-precision and high-fidelity face editing for pre-trained diffusion models. We observe that both face reenactment/swapping tasks essentially involve combinations of target structure, ID and attribute. We aim to sufficiently decouple the control of these factors to achieve both tasks in one model. Specifically, our method contains: 1) A Spatial Condition Generator that provides precise landmarks and background; 2) A Plug-and-play Identity Encoder that transfers face embeddings to the text space by a transformer decoder. 3) An Attribute Controller that integrates spatial conditions and detailed attributes. Face-Adapter achieves comparable or even superior performance in terms of motion control precision, ID retention capability, and generation quality compared to fully fine-tuned face reenactment/swapping models. Additionally, Face-Adapter seamlessly integrates with various StableDiffusion models.
Reducing Transformer Key-Value Cache Size with Cross-Layer Attention
Key-value (KV) caching plays an essential role in accelerating decoding for transformer-based autoregressive large language models (LLMs). However, the amount of memory required to store the KV cache can become prohibitive at long sequence lengths and large batch sizes. Since the invention of the transformer, two of the most effective interventions discovered for reducing the size of the KV cache have been Multi-Query Attention (MQA) and its generalization, Grouped-Query Attention (GQA). MQA and GQA both modify the design of the attention block so that multiple query heads can share a single key/value head, reducing the number of distinct key/value heads by a large factor while only minimally degrading accuracy. In this paper, we show that it is possible to take Multi-Query Attention a step further by also sharing key and value heads between adjacent layers, yielding a new attention design we call Cross-Layer Attention (CLA). With CLA, we find that it is possible to reduce the size of the KV cache by another 2x while maintaining nearly the same accuracy as unmodified MQA. In experiments training 1B- and 3B-parameter models from scratch, we demonstrate that CLA provides a Pareto improvement over the memory/accuracy tradeoffs which are possible with traditional MQA, enabling inference with longer sequence lengths and larger batch sizes than would otherwise be possible
OmniGlue: Generalizable Feature Matching with Foundation Model Guidance
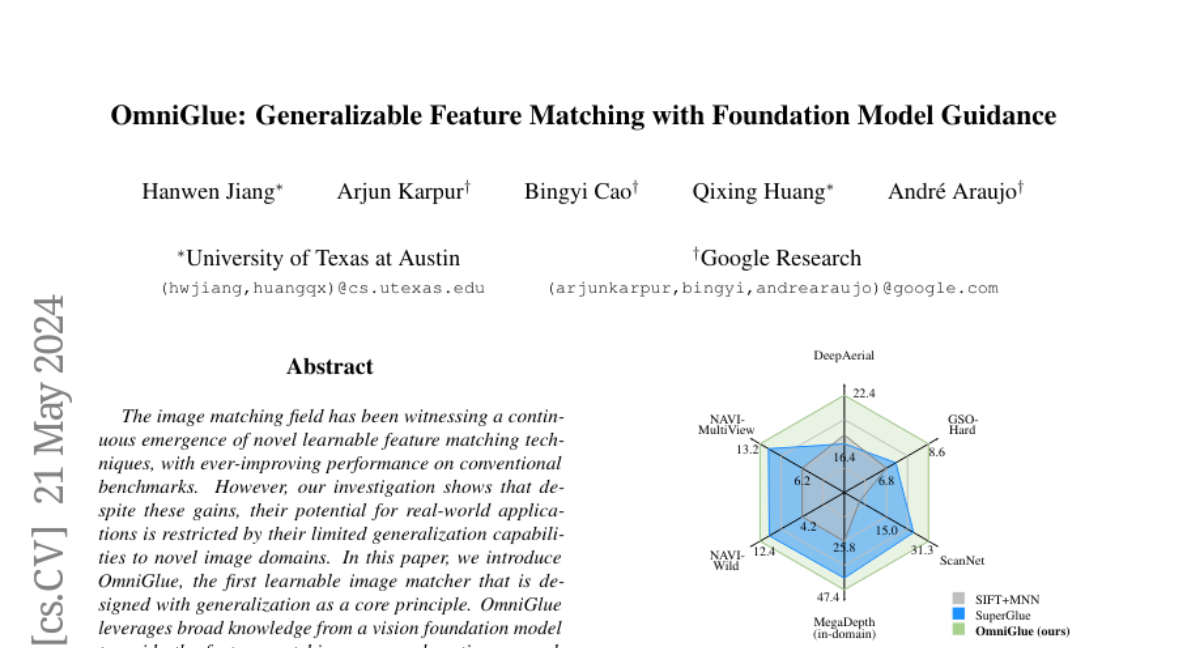
The image matching field has been witnessing a continuous emergence of novel learnable feature matching techniques, with ever-improving performance on conventional benchmarks. However, our investigation shows that despite these gains, their potential for real-world applications is restricted by their limited generalization capabilities to novel image domains. In this paper, we introduce OmniGlue, the first learnable image matcher that is designed with generalization as a core principle. OmniGlue leverages broad knowledge from a vision foundation model to guide the feature matching process, boosting generalization to domains not seen at training time. Additionally, we propose a novel keypoint position-guided attention mechanism which disentangles spatial and appearance information, leading to enhanced matching descriptors. We perform comprehensive experiments on a suite of $7$ datasets with varied image domains, including scene-level, object-centric and aerial images. OmniGlue's novel components lead to relative gains on unseen domains of $20.9\%$ with respect to a directly comparable reference model, while also outperforming the recent LightGlue method by $9.5\%$ relatively.Code and model can be found at https://hwjiang1510.github.io/OmniGlue
Personalized Residuals for Concept-Driven Text-to-Image Generation
We present personalized residuals and localized attention-guided sampling for efficient concept-driven generation using text-to-image diffusion models. Our method first represents concepts by freezing the weights of a pretrained text-conditioned diffusion model and learning low-rank residuals for a small subset of the model's layers. The residual-based approach then directly enables application of our proposed sampling technique, which applies the learned residuals only in areas where the concept is localized via cross-attention and applies the original diffusion weights in all other regions. Localized sampling therefore combines the learned identity of the concept with the existing generative prior of the underlying diffusion model. We show that personalized residuals effectively capture the identity of a concept in ~3 minutes on a single GPU without the use of regularization images and with fewer parameters than previous models, and localized sampling allows using the original model as strong prior for large parts of the image.