COCONut: Modernizing COCO Segmentation

In recent decades, the vision community has witnessed remarkable progress in visual recognition, partially owing to advancements in dataset benchmarks. Notably, the established COCO benchmark has propelled the development of modern detection and segmentation systems. However, the COCO segmentation benchmark has seen comparatively slow improvement over the last decade. Originally equipped with coarse polygon annotations for thing instances, it gradually incorporated coarse superpixel annotations for stuff regions, which were subsequently heuristically amalgamated to yield panoptic segmentation annotations. These annotations, executed by different groups of raters, have resulted not only in coarse segmentation masks but also in inconsistencies between segmentation types. In this study, we undertake a comprehensive reevaluation of the COCO segmentation annotations. By enhancing the annotation quality and expanding the dataset to encompass 383K images with more than 5.18M panoptic masks, we introduce COCONut, the COCO Next Universal segmenTation dataset. COCONut harmonizes segmentation annotations across semantic, instance, and panoptic segmentation with meticulously crafted high-quality masks, and establishes a robust benchmark for all segmentation tasks. To our knowledge, COCONut stands as the inaugural large-scale universal segmentation dataset, verified by human raters. We anticipate that the release of COCONut will significantly contribute to the community's ability to assess the progress of novel neural networks.
Scaling (Down) CLIP: A Comprehensive Analysis of Data, Architecture, and Training Strategies
This paper investigates the performance of the Contrastive Language-Image Pre-training (CLIP) when scaled down to limited computation budgets. We explore CLIP along three dimensions: data, architecture, and training strategies. With regards to data, we demonstrate the significance of high-quality training data and show that a smaller dataset of high-quality data can outperform a larger dataset with lower quality. We also examine how model performance varies with different dataset sizes, suggesting that smaller ViT models are better suited for smaller datasets, while larger models perform better on larger datasets with fixed compute. Additionally, we provide guidance on when to choose a CNN-based architecture or a ViT-based architecture for CLIP training. We compare four CLIP training strategies - SLIP, FLIP, CLIP, and CLIP+Data Augmentation - and show that the choice of training strategy depends on the available compute resource. Our analysis reveals that CLIP+Data Augmentation can achieve comparable performance to CLIP using only half of the training data. This work provides practical insights into how to effectively train and deploy CLIP models, making them more accessible and affordable for practical use in various applications.
On the Robustness of Language Guidance for Low-Level Vision Tasks: Findings from Depth Estimation
Recent advances in monocular depth estimation have been made by incorporating natural language as additional guidance. Although yielding impressive results, the impact of the language prior, particularly in terms of generalization and robustness, remains unexplored. In this paper, we address this gap by quantifying the impact of this prior and introduce methods to benchmark its effectiveness across various settings. We generate "low-level" sentences that convey object-centric, three-dimensional spatial relationships, incorporate them as additional language priors and evaluate their downstream impact on depth estimation. Our key finding is that current language-guided depth estimators perform optimally only with scene-level descriptions and counter-intuitively fare worse with low level descriptions. Despite leveraging additional data, these methods are not robust to directed adversarial attacks and decline in performance with an increase in distribution shift. Finally, to provide a foundation for future research, we identify points of failures and offer insights to better understand these shortcomings. With an increasing number of methods using language for depth estimation, our findings highlight the opportunities and pitfalls that require careful consideration for effective deployment in real-world settings
Pre-training Small Base LMs with Fewer Tokens

We study the effectiveness of a simple approach to develop a small base language model (LM) starting from an existing large base LM: first inherit a few transformer blocks from the larger LM, and then train this smaller model on a very small subset (0.1\%) of the raw pretraining data of the larger model. We call our simple recipe Inheritune and first demonstrate it for building a small base LM with 1.5B parameters using 1B tokens (and a starting few layers of larger LM of 3B parameters); we do this using a single A6000 GPU for less than half a day. Across 9 diverse evaluation datasets as well as the MMLU benchmark, the resulting model compares favorably to publicly available base models of 1B-2B size, some of which have been trained using 50-1000 times more tokens. We investigate Inheritune in a slightly different setting where we train small LMs utilizing larger LMs and their full pre-training dataset. Here we show that smaller LMs trained utilizing some of the layers of GPT2-medium (355M) and GPT-2-large (770M) can effectively match the val loss of their bigger counterparts when trained from scratch for the same number of training steps on OpenWebText dataset with 9B tokens. We analyze our recipe with extensive experiments and demonstrate it efficacy on diverse settings. Our code is available at https://github.com/sanyalsunny111/LLM-Inheritune.
Dataset Reset Policy Optimization for RLHF

Reinforcement Learning (RL) from Human Preference-based feedback is a popular paradigm for fine-tuning generative models, which has produced impressive models such as GPT-4 and Claude3 Opus. This framework often consists of two steps: learning a reward model from an offline preference dataset followed by running online RL to optimize the learned reward model. In this work, leveraging the idea of reset, we propose a new RLHF algorithm with provable guarantees. Motivated by the fact that offline preference dataset provides informative states (i.e., data that is preferred by the labelers), our new algorithm, Dataset Reset Policy Optimization (DR-PO), integrates the existing offline preference dataset into the online policy training procedure via dataset reset: it directly resets the policy optimizer to the states in the offline dataset, instead of always starting from the initial state distribution. In theory, we show that DR-PO learns to perform at least as good as any policy that is covered by the offline dataset under general function approximation with finite sample complexity. In experiments, we demonstrate that on both the TL;DR summarization and the Anthropic Helpful Harmful (HH) dataset, the generation from DR-PO is better than that from Proximal Policy Optimization (PPO) and Direction Preference Optimization (DPO), under the metric of GPT4 win-rate. Code for this work can be found at https://github.com/Cornell-RL/drpo.
Probing the 3D Awareness of Visual Foundation Models
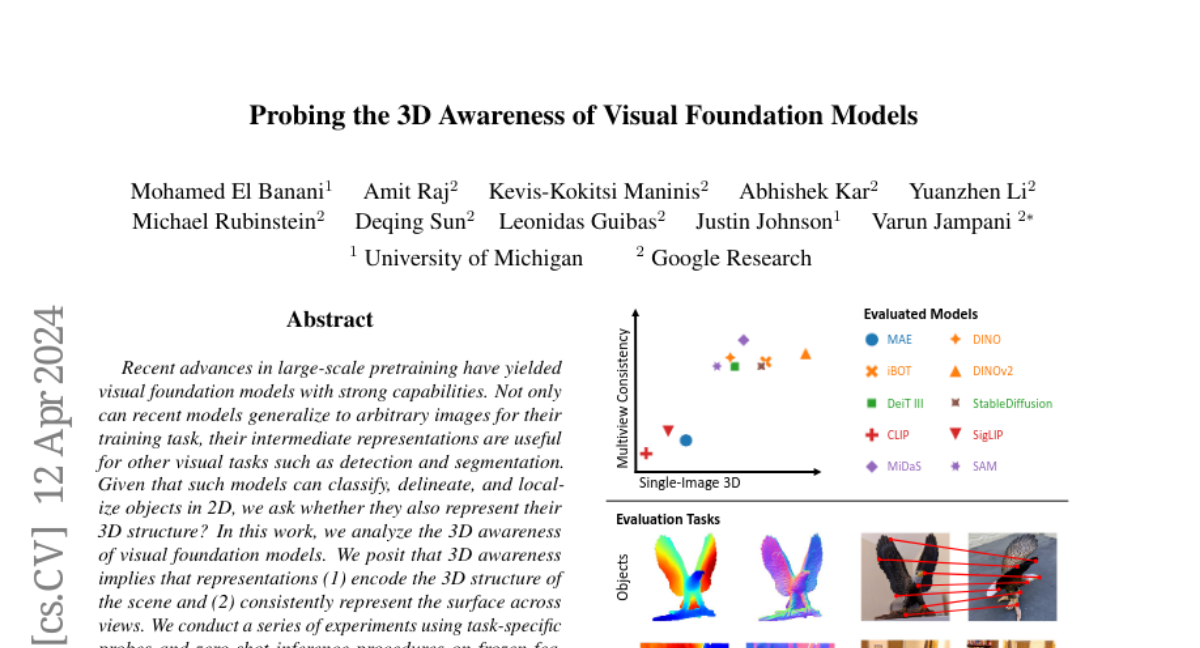
Recent advances in large-scale pretraining have yielded visual foundation models with strong capabilities. Not only can recent models generalize to arbitrary images for their training task, their intermediate representations are useful for other visual tasks such as detection and segmentation. Given that such models can classify, delineate, and localize objects in 2D, we ask whether they also represent their 3D structure? In this work, we analyze the 3D awareness of visual foundation models. We posit that 3D awareness implies that representations (1) encode the 3D structure of the scene and (2) consistently represent the surface across views. We conduct a series of experiments using task-specific probes and zero-shot inference procedures on frozen features. Our experiments reveal several limitations of the current models. Our code and analysis can be found at https://github.com/mbanani/probe3d.
MonoPatchNeRF: Improving Neural Radiance Fields with Patch-based Monocular Guidance
The latest regularized Neural Radiance Field (NeRF) approaches produce poor geometry and view extrapolation for multiview stereo (MVS) benchmarks such as ETH3D. In this paper, we aim to create 3D models that provide accurate geometry and view synthesis, partially closing the large geometric performance gap between NeRF and traditional MVS methods. We propose a patch-based approach that effectively leverages monocular surface normal and relative depth predictions. The patch-based ray sampling also enables the appearance regularization of normalized cross-correlation (NCC) and structural similarity (SSIM) between randomly sampled virtual and training views. We further show that "density restrictions" based on sparse structure-from-motion points can help greatly improve geometric accuracy with a slight drop in novel view synthesis metrics. Our experiments show 4x the performance of RegNeRF and 8x that of FreeNeRF on average F1@2cm for ETH3D MVS benchmark, suggesting a fruitful research direction to improve the geometric accuracy of NeRF-based models, and sheds light on a potential future approach to enable NeRF-based optimization to eventually outperform traditional MVS.