Branch-Train-MiX: Mixing Expert LLMs into a Mixture-of-Experts LLM
We investigate efficient methods for training Large Language Models (LLMs) to possess capabilities in multiple specialized domains, such as coding, math reasoning and world knowledge. Our method, named Branch-Train-MiX (BTX), starts from a seed model, which is branched to train experts in embarrassingly parallel fashion with high throughput and reduced communication cost. After individual experts are asynchronously trained, BTX brings together their feedforward parameters as experts in Mixture-of-Expert (MoE) layers and averages the remaining parameters, followed by an MoE-finetuning stage to learn token-level routing. BTX generalizes two special cases, the Branch-Train-Merge method, which does not have the MoE finetuning stage to learn routing, and sparse upcycling, which omits the stage of training experts asynchronously. Compared to alternative approaches, BTX achieves the best accuracy-efficiency tradeoff.
MoAI: Mixture of All Intelligence for Large Language and Vision Models
The rise of large language models (LLMs) and instruction tuning has led to the current trend of instruction-tuned large language and vision models (LLVMs). This trend involves either meticulously curating numerous instruction tuning datasets tailored to specific objectives or enlarging LLVMs to manage vast amounts of vision language (VL) data. However, current LLVMs have disregarded the detailed and comprehensive real-world scene understanding available from specialized computer vision (CV) models in visual perception tasks such as segmentation, detection, scene graph generation (SGG), and optical character recognition (OCR). Instead, the existing LLVMs rely mainly on the large capacity and emergent capabilities of their LLM backbones. Therefore, we present a new LLVM, Mixture of All Intelligence (MoAI), which leverages auxiliary visual information obtained from the outputs of external segmentation, detection, SGG, and OCR models. MoAI operates through two newly introduced modules: MoAI-Compressor and MoAI-Mixer. After verbalizing the outputs of the external CV models, the MoAI-Compressor aligns and condenses them to efficiently use relevant auxiliary visual information for VL tasks. MoAI-Mixer then blends three types of intelligence (1) visual features, (2) auxiliary features from the external CV models, and (3) language features by utilizing the concept of Mixture of Experts. Through this integration, MoAI significantly outperforms both open-source and closed-source LLVMs in numerous zero-shot VL tasks, particularly those related to real-world scene understanding such as object existence, positions, relations, and OCR without enlarging the model size or curating extra visual instruction tuning datasets.
Synth$^2$: Boosting Visual-Language Models with Synthetic Captions and Image Embeddings

The creation of high-quality human-labeled image-caption datasets presents a significant bottleneck in the development of Visual-Language Models (VLMs). We propose a novel approach that leverages the strengths of Large Language Models (LLMs) and image generation models to create synthetic image-text pairs for efficient and effective VLM training. Our method employs pretraining a text-to-image model to synthesize image embeddings starting from captions generated by an LLM. These synthetic pairs are then used to train a VLM. Extensive experiments demonstrate that the VLM trained with synthetic data exhibits comparable performance on image captioning, while requiring a fraction of the data used by models trained solely on human-annotated data. In particular, we outperform the baseline by 17% through augmentation with a synthetic dataset. Furthermore, we show that synthesizing in the image embedding space is 25% faster than in the pixel space. This research introduces a promising technique for generating large-scale, customizable image datasets, leading to enhanced VLM performance and wider applicability across various domains, all with improved data efficiency and resource utilization.
Chronos: Learning the Language of Time Series
We introduce Chronos, a simple yet effective framework for pretrained probabilistic time series models. Chronos tokenizes time series values using scaling and quantization into a fixed vocabulary and trains existing transformer-based language model architectures on these tokenized time series via the cross-entropy loss. We pretrained Chronos models based on the T5 family (ranging from 20M to 710M parameters) on a large collection of publicly available datasets, complemented by a synthetic dataset that we generated via Gaussian processes to improve generalization. In a comprehensive benchmark consisting of 42 datasets, and comprising both classical local models and deep learning methods, we show that Chronos models: (a) significantly outperform other methods on datasets that were part of the training corpus; and (b) have comparable and occasionally superior zero-shot performance on new datasets, relative to methods that were trained specifically on them. Our results demonstrate that Chronos models can leverage time series data from diverse domains to improve zero-shot accuracy on unseen forecasting tasks, positioning pretrained models as a viable tool to greatly simplify forecasting pipelines.
Learning Generalizable Feature Fields for Mobile Manipulation
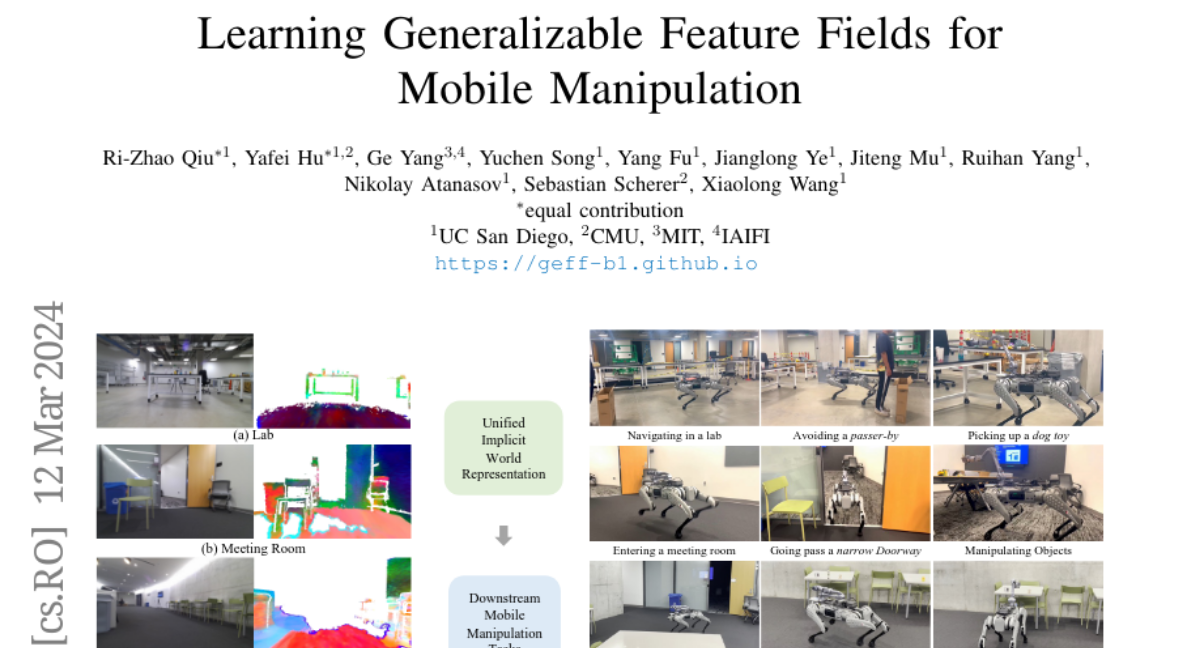
An open problem in mobile manipulation is how to represent objects and scenes in a unified manner, so that robots can use it both for navigating in the environment and manipulating objects. The latter requires capturing intricate geometry while understanding fine-grained semantics, whereas the former involves capturing the complexity inherit to an expansive physical scale. In this work, we present GeFF (Generalizable Feature Fields), a scene-level generalizable neural feature field that acts as a unified representation for both navigation and manipulation that performs in real-time. To do so, we treat generative novel view synthesis as a pre-training task, and then align the resulting rich scene priors with natural language via CLIP feature distillation. We demonstrate the effectiveness of this approach by deploying GeFF on a quadrupedal robot equipped with a manipulator. We evaluate GeFF's ability to generalize to open-set objects as well as running time, when performing open-vocabulary mobile manipulation in dynamic scenes.
Motion Mamba: Efficient and Long Sequence Motion Generation with Hierarchical and Bidirectional Selective SSM

Human motion generation stands as a significant pursuit in generative computer vision, while achieving long-sequence and efficient motion generation remains challenging. Recent advancements in state space models (SSMs), notably Mamba, have showcased considerable promise in long sequence modeling with an efficient hardware-aware design, which appears to be a promising direction to build motion generation model upon it. Nevertheless, adapting SSMs to motion generation faces hurdles since the lack of a specialized design architecture to model motion sequence. To address these challenges, we propose Motion Mamba, a simple and efficient approach that presents the pioneering motion generation model utilized SSMs. Specifically, we design a Hierarchical Temporal Mamba (HTM) block to process temporal data by ensemble varying numbers of isolated SSM modules across a symmetric U-Net architecture aimed at preserving motion consistency between frames. We also design a Bidirectional Spatial Mamba (BSM) block to bidirectionally process latent poses, to enhance accurate motion generation within a temporal frame. Our proposed method achieves up to 50% FID improvement and up to 4 times faster on the HumanML3D and KIT-ML datasets compared to the previous best diffusion-based method, which demonstrates strong capabilities of high-quality long sequence motion modeling and real-time human motion generation. See project website https://steve-zeyu-zhang.github.io/MotionMamba/
FAX: Scalable and Differentiable Federated Primitives in JAX
We present FAX, a JAX-based library designed to support large-scale distributed and federated computations in both data center and cross-device applications. FAX leverages JAX's sharding mechanisms to enable native targeting of TPUs and state-of-the-art JAX runtimes, including Pathways. FAX embeds building blocks for federated computations as primitives in JAX. This enables three key benefits. First, FAX computations can be translated to XLA HLO. Second, FAX provides a full implementation of federated automatic differentiation, greatly simplifying the expression of federated computations. Last, FAX computations can be interpreted out to existing production cross-device federated compute systems. We show that FAX provides an easily programmable, performant, and scalable framework for federated computations in the data center. FAX is available at https://github.com/google-research/google-research/tree/master/fax .
DragAnything: Motion Control for Anything using Entity Representation
We introduce DragAnything, which utilizes a entity representation to achieve motion control for any object in controllable video generation. Comparison to existing motion control methods, DragAnything offers several advantages. Firstly, trajectory-based is more userfriendly for interaction, when acquiring other guidance signals (e.g., masks, depth maps) is labor-intensive. Users only need to draw a line (trajectory) during interaction. Secondly, our entity representation serves as an open-domain embedding capable of representing any object, enabling the control of motion for diverse entities, including background. Lastly, our entity representation allows simultaneous and distinct motion control for multiple objects. Extensive experiments demonstrate that our DragAnything achieves state-of-the-art performance for FVD, FID, and User Study, particularly in terms of object motion control, where our method surpasses the previous methods (e.g., DragNUWA) by 26% in human voting.