Phi-3 Technical Report: A Highly Capable Language Model Locally on Your Phone
We introduce phi-3-mini, a 3.8 billion parameter language model trained on 3.3 trillion tokens, whose overall performance, as measured by both academic benchmarks and internal testing, rivals that of models such as Mixtral 8x7B and GPT-3.5 (e.g., phi-3-mini achieves 69% on MMLU and 8.38 on MT-bench), despite being small enough to be deployed on a phone. The innovation lies entirely in our dataset for training, a scaled-up version of the one used for phi-2, composed of heavily filtered web data and synthetic data. The model is also further aligned for robustness, safety, and chat format. We also provide some initial parameter-scaling results with a 7B and 14B models trained for 4.8T tokens, called phi-3-small and phi-3-medium, both significantly more capable than phi-3-mini (e.g., respectively 75% and 78% on MMLU, and 8.7 and 8.9 on MT-bench).
The Instruction Hierarchy: Training LLMs to Prioritize Privileged Instructions
Today's LLMs are susceptible to prompt injections, jailbreaks, and other attacks that allow adversaries to overwrite a model's original instructions with their own malicious prompts. In this work, we argue that one of the primary vulnerabilities underlying these attacks is that LLMs often consider system prompts (e.g., text from an application developer) to be the same priority as text from untrusted users and third parties. To address this, we propose an instruction hierarchy that explicitly defines how models should behave when instructions of different priorities conflict. We then propose a data generation method to demonstrate this hierarchical instruction following behavior, which teaches LLMs to selectively ignore lower-privileged instructions. We apply this method to GPT-3.5, showing that it drastically increases robustness -- even for attack types not seen during training -- while imposing minimal degradations on standard capabilities.
FlowMind: Automatic Workflow Generation with LLMs
The rapidly evolving field of Robotic Process Automation (RPA) has made significant strides in automating repetitive processes, yet its effectiveness diminishes in scenarios requiring spontaneous or unpredictable tasks demanded by users. This paper introduces a novel approach, FlowMind, leveraging the capabilities of Large Language Models (LLMs) such as Generative Pretrained Transformer (GPT), to address this limitation and create an automatic workflow generation system. In FlowMind, we propose a generic prompt recipe for a lecture that helps ground LLM reasoning with reliable Application Programming Interfaces (APIs). With this, FlowMind not only mitigates the common issue of hallucinations in LLMs, but also eliminates direct interaction between LLMs and proprietary data or code, thus ensuring the integrity and confidentiality of information - a cornerstone in financial services. FlowMind further simplifies user interaction by presenting high-level descriptions of auto-generated workflows, enabling users to inspect and provide feedback effectively. We also introduce NCEN-QA, a new dataset in finance for benchmarking question-answering tasks from N-CEN reports on funds. We used NCEN-QA to evaluate the performance of workflows generated by FlowMind against baseline and ablation variants of FlowMind. We demonstrate the success of FlowMind, the importance of each component in the proposed lecture recipe, and the effectiveness of user interaction and feedback in FlowMind.
Music Consistency Models
Consistency models have exhibited remarkable capabilities in facilitating efficient image/video generation, enabling synthesis with minimal sampling steps. It has proven to be advantageous in mitigating the computational burdens associated with diffusion models. Nevertheless, the application of consistency models in music generation remains largely unexplored. To address this gap, we present Music Consistency Models (\texttt{MusicCM}), which leverages the concept of consistency models to efficiently synthesize mel-spectrogram for music clips, maintaining high quality while minimizing the number of sampling steps. Building upon existing text-to-music diffusion models, the \texttt{MusicCM} model incorporates consistency distillation and adversarial discriminator training. Moreover, we find it beneficial to generate extended coherent music by incorporating multiple diffusion processes with shared constraints. Experimental results reveal the effectiveness of our model in terms of computational efficiency, fidelity, and naturalness. Notable, \texttt{MusicCM} achieves seamless music synthesis with a mere four sampling steps, e.g., only one second per minute of the music clip, showcasing the potential for real-time application.
Hyper-SD: Trajectory Segmented Consistency Model for Efficient Image Synthesis
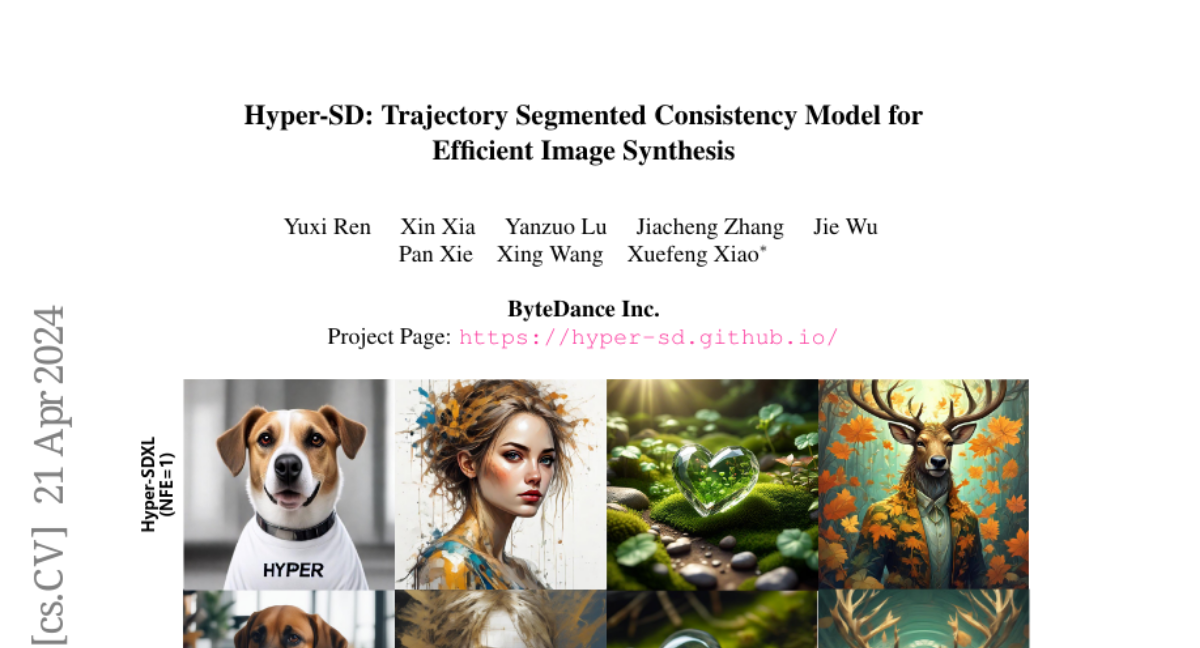
Recently, a series of diffusion-aware distillation algorithms have emerged to alleviate the computational overhead associated with the multi-step inference process of Diffusion Models (DMs). Current distillation techniques often dichotomize into two distinct aspects: i) ODE Trajectory Preservation; and ii) ODE Trajectory Reformulation. However, these approaches suffer from severe performance degradation or domain shifts. To address these limitations, we propose Hyper-SD, a novel framework that synergistically amalgamates the advantages of ODE Trajectory Preservation and Reformulation, while maintaining near-lossless performance during step compression. Firstly, we introduce Trajectory Segmented Consistency Distillation to progressively perform consistent distillation within pre-defined time-step segments, which facilitates the preservation of the original ODE trajectory from a higher-order perspective. Secondly, we incorporate human feedback learning to boost the performance of the model in a low-step regime and mitigate the performance loss incurred by the distillation process. Thirdly, we integrate score distillation to further improve the low-step generation capability of the model and offer the first attempt to leverage a unified LoRA to support the inference process at all steps. Extensive experiments and user studies demonstrate that Hyper-SD achieves SOTA performance from 1 to 8 inference steps for both SDXL and SD1.5. For example, Hyper-SDXL surpasses SDXL-Lightning by +0.68 in CLIP Score and +0.51 in Aes Score in the 1-step inference.
A Multimodal Automated Interpretability Agent
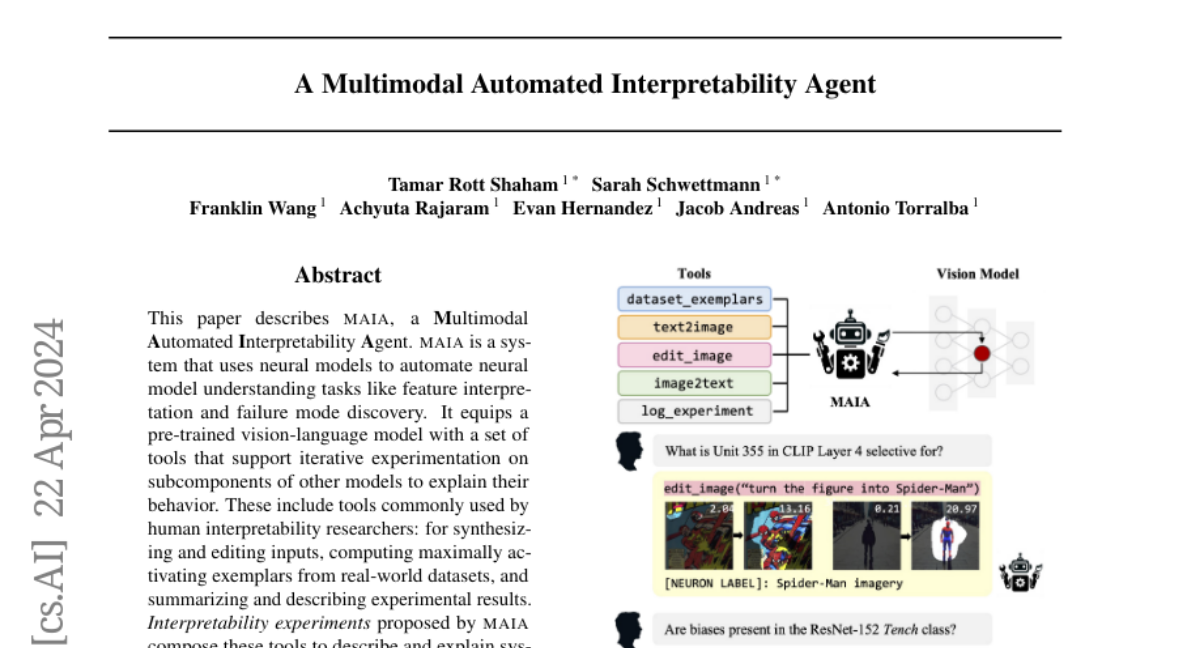
This paper describes MAIA, a Multimodal Automated Interpretability Agent. MAIA is a system that uses neural models to automate neural model understanding tasks like feature interpretation and failure mode discovery. It equips a pre-trained vision-language model with a set of tools that support iterative experimentation on subcomponents of other models to explain their behavior. These include tools commonly used by human interpretability researchers: for synthesizing and editing inputs, computing maximally activating exemplars from real-world datasets, and summarizing and describing experimental results. Interpretability experiments proposed by MAIA compose these tools to describe and explain system behavior. We evaluate applications of MAIA to computer vision models. We first characterize MAIA's ability to describe (neuron-level) features in learned representations of images. Across several trained models and a novel dataset of synthetic vision neurons with paired ground-truth descriptions, MAIA produces descriptions comparable to those generated by expert human experimenters. We then show that MAIA can aid in two additional interpretability tasks: reducing sensitivity to spurious features, and automatically identifying inputs likely to be mis-classified.
How Good Are Low-bit Quantized LLaMA3 Models? An Empirical Study
Meta's LLaMA family has become one of the most powerful open-source Large Language Model (LLM) series. Notably, LLaMA3 models have recently been released and achieve impressive performance across various with super-large scale pre-training on over 15T tokens of data. Given the wide application of low-bit quantization for LLMs in resource-limited scenarios, we explore LLaMA3's capabilities when quantized to low bit-width. This exploration holds the potential to unveil new insights and challenges for low-bit quantization of LLaMA3 and other forthcoming LLMs, especially in addressing performance degradation problems that suffer in LLM compression. Specifically, we evaluate the 10 existing post-training quantization and LoRA-finetuning methods of LLaMA3 on 1-8 bits and diverse datasets to comprehensively reveal LLaMA3's low-bit quantization performance. Our experiment results indicate that LLaMA3 still suffers non-negligent degradation in these scenarios, especially in ultra-low bit-width. This highlights the significant performance gap under low bit-width that needs to be bridged in future developments. We expect that this empirical study will prove valuable in advancing future models, pushing the LLMs to lower bit-width with higher accuracy for being practical. Our project is released on https://github.com/Macaronlin/LLaMA3-Quantization and quantized LLaMA3 models are released in https://huggingface.co/LLMQ.
SEED-X: Multimodal Models with Unified Multi-granularity Comprehension and Generation
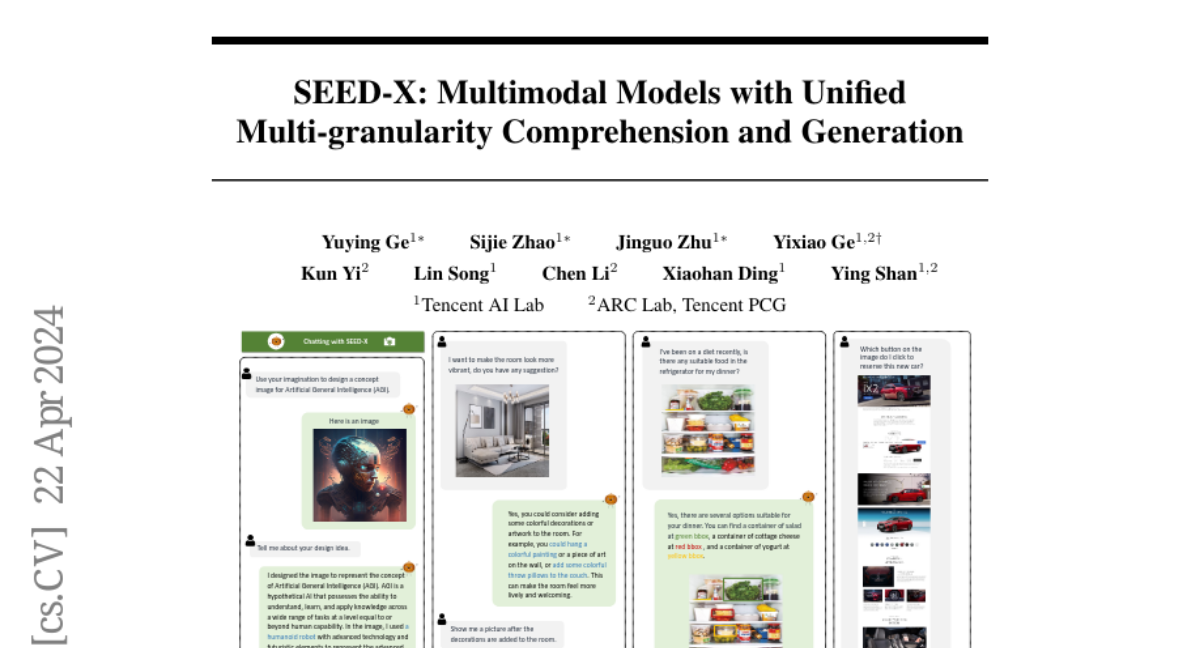
The rapid evolution of multimodal foundation model has demonstrated significant progresses in vision-language understanding and generation, e.g., our previous work SEED-LLaMA. However, there remains a gap between its capability and the real-world applicability, primarily due to the model's limited capacity to effectively respond to various user instructions and interact with diverse visual data. In this work, we focus on bridging this gap through integrating two enhanced features: (1) comprehending images of arbitrary sizes and ratios, and (2) enabling multi-granularity image generation. We present a unified and versatile foundation model, namely, SEED-X, which is able to model multi-granularity visual semantics for comprehension and generation tasks. Besides the competitive results on public benchmarks, SEED-X demonstrates its effectiveness in handling real-world applications across various domains after instruction tuning. We hope that our work will inspire future research into what can be achieved by versatile multimodal foundation models in real-world applications. The models, codes, and datasets will be released in https://github.com/AILab-CVC/SEED-X.
MultiBooth: Towards Generating All Your Concepts in an Image from Text
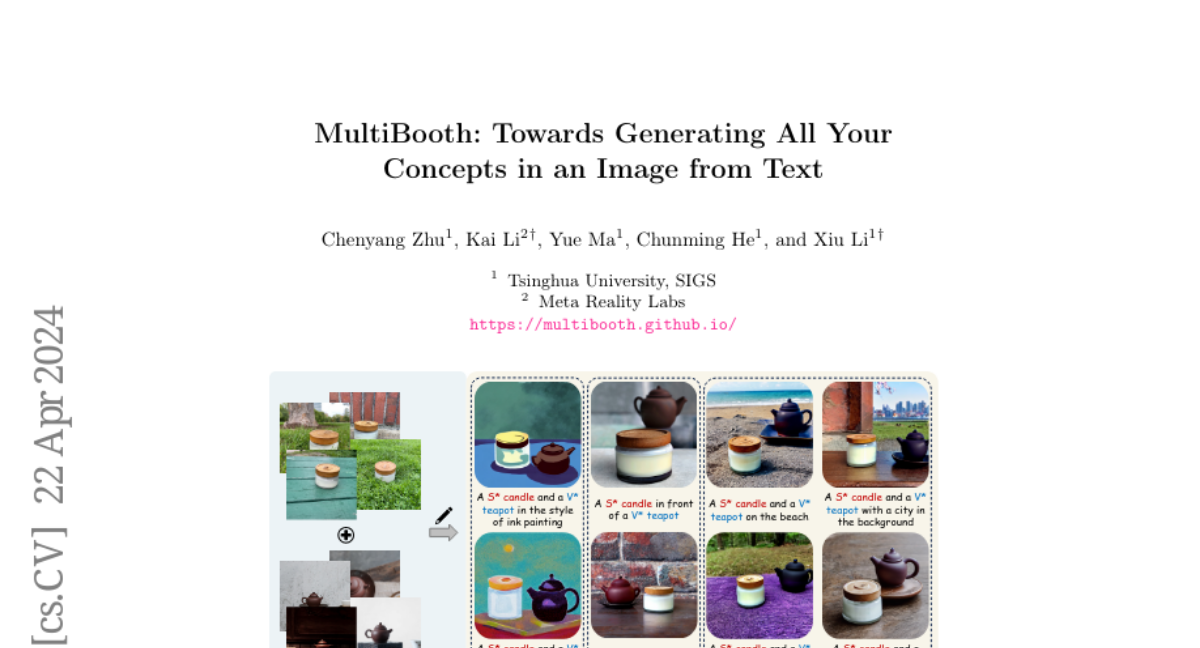
This paper introduces MultiBooth, a novel and efficient technique for multi-concept customization in image generation from text. Despite the significant advancements in customized generation methods, particularly with the success of diffusion models, existing methods often struggle with multi-concept scenarios due to low concept fidelity and high inference cost. MultiBooth addresses these issues by dividing the multi-concept generation process into two phases: a single-concept learning phase and a multi-concept integration phase. During the single-concept learning phase, we employ a multi-modal image encoder and an efficient concept encoding technique to learn a concise and discriminative representation for each concept. In the multi-concept integration phase, we use bounding boxes to define the generation area for each concept within the cross-attention map. This method enables the creation of individual concepts within their specified regions, thereby facilitating the formation of multi-concept images. This strategy not only improves concept fidelity but also reduces additional inference cost. MultiBooth surpasses various baselines in both qualitative and quantitative evaluations, showcasing its superior performance and computational efficiency. Project Page: https://multibooth.github.io/
Learning H-Infinity Locomotion Control
Stable locomotion in precipitous environments is an essential capability of quadruped robots, demanding the ability to resist various external disturbances. However, recent learning-based policies only use basic domain randomization to improve the robustness of learned policies, which cannot guarantee that the robot has adequate disturbance resistance capabilities. In this paper, we propose to model the learning process as an adversarial interaction between the actor and a newly introduced disturber and ensure their optimization with $H_{\infty}$ constraint. In contrast to the actor that maximizes the discounted overall reward, the disturber is responsible for generating effective external forces and is optimized by maximizing the error between the task reward and its oracle, i.e., "cost" in each iteration. To keep joint optimization between the actor and the disturber stable, our $H_{\infty}$ constraint mandates the bound of ratio between the cost to the intensity of the external forces. Through reciprocal interaction throughout the training phase, the actor can acquire the capability to navigate increasingly complex physical disturbances. We verify the robustness of our approach on quadrupedal locomotion tasks with Unitree Aliengo robot, and also a more challenging task with Unitree A1 robot, where the quadruped is expected to perform locomotion merely on its hind legs as if it is a bipedal robot. The simulated quantitative results show improvement against baselines, demonstrating the effectiveness of the method and each design choice. On the other hand, real-robot experiments qualitatively exhibit how robust the policy is when interfering with various disturbances on various terrains, including stairs, high platforms, slopes, and slippery terrains. All code, checkpoints, and real-world deployment guidance will be made public.
Scene Coordinate Reconstruction: Posing of Image Collections via Incremental Learning of a Relocalizer
We address the task of estimating camera parameters from a set of images depicting a scene. Popular feature-based structure-from-motion (SfM) tools solve this task by incremental reconstruction: they repeat triangulation of sparse 3D points and registration of more camera views to the sparse point cloud. We re-interpret incremental structure-from-motion as an iterated application and refinement of a visual relocalizer, that is, of a method that registers new views to the current state of the reconstruction. This perspective allows us to investigate alternative visual relocalizers that are not rooted in local feature matching. We show that scene coordinate regression, a learning-based relocalization approach, allows us to build implicit, neural scene representations from unposed images. Different from other learning-based reconstruction methods, we do not require pose priors nor sequential inputs, and we optimize efficiently over thousands of images. Our method, ACE0 (ACE Zero), estimates camera poses to an accuracy comparable to feature-based SfM, as demonstrated by novel view synthesis. Project page: https://nianticlabs.github.io/acezero/